This class was about an itroduction to robotics arms and all the different processes this machine can do for us. The possibilities are a very wide range, from 3D printing at big scale to cutting foam, pick and place,... the six axis of this machine makes the creation of the files for it very complex, since the coordinates for the Gcode has to contain 6 points.
We also learned a bit about composites and molding with the vacum, I had to miss half of the demostration class for personal reasons.
Anyway, what intersted me the most out of this week was the introduction to soft robotics since I think it might finally be the solution to create the wearble that I aim to fill with spirulina.
Weekly task
Design and produce something with a digital fabrication process (incorporating computer-aided design and manufacturing) not covered in another tasks
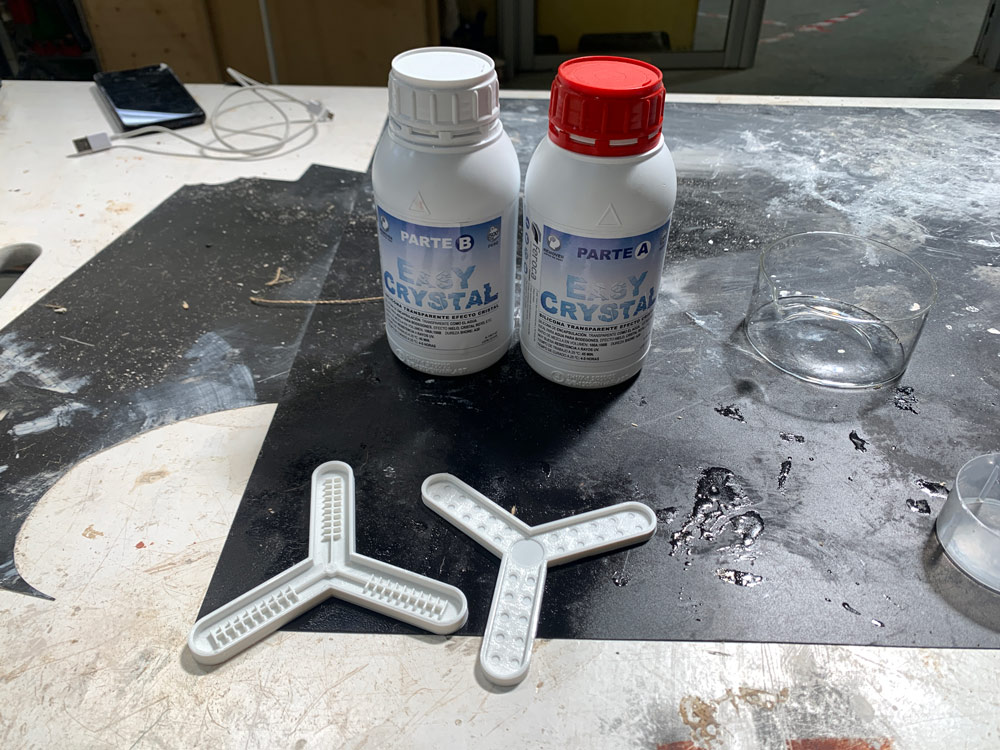
I attempted to do the soft robotics technic testing a Thingiverse gripper to start understanding better how to use this technique could be use to fabricate my final project since the idea is to create a wearable that will host the spirulina inside instead of air. 3D printed the mold and did a first attempted with the cristal frozen silicone which ended up on the trash because I think I didn’t measure the silicone properly so it didn’t curate. Second attempt was with the platinum silicone and in this case I manage to cast both pieces.


Another fabrication technique that I experimented with was drawing with the penploter machine that we worked on for the 4th micro challenge. The generated drawing by processing were translated into coordinates and sent to another arduino, with serial communication, in form of GCODE using only the axis x & y of a pretty cool 3D printing looking machine designed by our peers from fab academy. The idea is that the useer creates their own pattern that will be subsequently drawn on a fabric with a spirulina ink filled marker, this fabric would be cut into simple wearables to be use on the Biodesign party we are organizing for the MDEFest.